

3 - Elementos de um Sistema
DP
3.1 - Computadores
O processador que
opera o software de controle do DP são geralmente conhecidos como computadores
DP. A principal distinção com relação ao DPO é o número de computadores, seus
métodos de operação, e o grau de redundância que fornecem.
O termo redundância
refere-se a uma margem de segurança adicional com relação à inoperância de um
equipamento quando deve existir outro(s) disponíveis para uso imediato.
Os computadores
devem ser instalados em configurações simples, dupla ou tripla, dependendo do
grau de redundância requerido. Sistemas modernos se comunicam via ethernet, ou
rede local (LAN), os quais podem incorporar muitas funções de controle do navio
em adição ao DP.
Em todos navios DP,
os computadores de controle DP são dedicados especificamente para a função DP,
sem nenhuma outra tarefa. Um sistema de computador simples, ou sistema de
controle DP ‘simplex’ não fornece qualquer redundância. Um sistema dual ou de
dois computadores fornecem redundância, se o sistema on-line falhar. Um sistema
triplo ou ‘triplex’ fornece um elemento extra de segurança. O grau de redundância depende da classe do
equipamento selecionado pelo navio.
3.2 - Console de Controle
O
console da ponte é a instalação que o DPO utiliza para enviar e receber
dados. É onde se localiza todos controles de entrada, botões,
interruptores, indicadores, alarmes e telas. Em um navio bem projetado, painéis
de controle do sistema de referência de posição, painéis dos propulsores
(thrusters) e painéis de comunicações estão localizados perto dos consoles de
controle DP.

As instalações para o operador variam
de botões de pressão e/ou telas sensíveis ao toque.

OS da Pça de Máquinas
Na praça de máquina nossa O.S. (Operation
Station) controla todo o fornecimento de energia para que o DP
possa funcionar em paralelo ao consumo do navio
e seus equipamentos. Um navio não é só DP. Um AHTS
tem DP e os guinchos de manuseio, um navio de lançamento de linha tem o
DP e seus guinchos e guindastes e por ai vamos. Para que tudo
isso funcione sem que o navio apague alguém tem
que controlar a demanda de carga no barramento, esse alguém não
é o maquinista é a PMS (Power Management System).
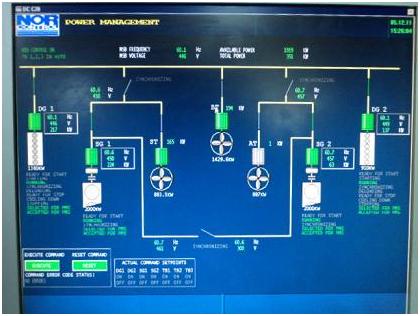
PMS
Pode ser Kongsberg, Rolls Royce, Siemens
ou outro qualquer , mas tem que dar conta do recado.
Não vemos mais a bordo aquelas alavancas pretas
para colocar o gerador em paralelo no manual. Hoje em dia até
o manual tá automático a bordo. Mas não vá pensando que isso
é desculpa para matar aula de elétrica pois não é, quem não
souber colocar gerador no barramento na mão
também não entenderá como funciona o automático.

No passadiço o DP tem seu computador
dedicado , é nele que o piloto faz suas manobras. Não
vou me aprofundar muito neste assunto pois quero
tratar da parte interna do DP não da
estação de controle do DP. Mas para quem não conhece é
importante saber que todo o DP é operado em um
computador específico para este fim, ele que fica interligado a
outro computador que é quem na verdade faz tudo funcionar.
Este computador se chama SBC, neste falaremos mais a frente.
3.3 - Sistemas de Referência de Posição
O número de referências de posições permitidos depende
de inúmeros fatores. Em particular, o grau de risco envolvido na
operação, o nível de redundância que seja sensível para a operação, a
disponibilidade de referências de um tipo adequado, e as conseqüências da perda
de uma ou mais referências de posição.
Uma variedade de sistemas de referência de posição
é usado pelos sistemas DP. Os tipos mais comuns são: posicionamento global
diferencial, taut wires (cabo tesado), hidroacústico (HPR), e o sistema laser
ou os sistemas de micro-ondas.
A confiabiliadade das referências de posição é de
grande importância. Cada uma tem vantagens e desvantagens, de maneira que uma
combinação seja essencial para uma alta confiabilidade.10 .

A informação de posição a partir de sistemas de
referência de posição pode ser recebida pelo sistema DP de várias formas. Além
disso o sistema de coordenada utilizado pode ser o cartesiano ou o geodésico. O sistema de controle DP é capaz
de lidar com informações com base em qualquer um dos sistemas.
Um sistema de coordenadas cartesiano, ou local, baseia-se
numa superfície plana de medição bidmensional das distâncias Norte/Sul (X) e
Leste/Oeste (Y) a partir de uma origem de referência definida localmente.

A maioria dos modernos sistemas DP de controle
habilitam o DPO a selecionar o tipo de apresentação necessária, e.g.
cartesianas, geográficas (latitude /longitude ou UTM). Neste último caso, o
sistema calculará automaticamente a zona UTM a partir de medições de posição
geodésicas recebidas. Os dados são normalmente selecionáveis a partir de um
menu.
3.4 - Referência de Rumo
O rumo do navio DP é fornecido por um ou mais
bússolas giroscópicas, as quais transmitem dados ao sistema de controle DP. Em
navios onde seja necessário redundância, então dois ou três giroscópios são
montados.
Se três giroscópios forem fornecidos, então o
sistema DP pode valer-se de duas para detectar uma falha da giro, e dar um
alerta apropriado ao DPO. Três giros são normalmente fornecidas em navios que
cumprem com a classe 2 ou 31 de equipamento.
Uma referência de rumo do navio pode também estar
disponível a partir de múltiplos receptores GPS.
3.5 – Referência de Meio Ambiente
Existem três forças ambientes
principais que fazem com que o navio se mova para fora de sua posição de
setpoint e/ou direcionamento da proa. São as forças criadas pelo vento, ondas e
corrente.
O sistema de controle DP não fornece
compensação ativa direta para ondas. Na prática, a frequência das ondas é tal
que não é confiável fornecer compensação para ondas individual e as forças são
muito elevadas. Os movimentos roll,
pitch e heave do navio não são compensados para o sistema de controle DP, mas é
necessário ao sistema de controle DP ser alimentado com valores precisos de
roll e pitch. Isto é para permitir com que a compensação seja aplicada a todas
os vários sensores de entrada de posições de referência para ajustes de offset a
partir do centro de gravidade do navio.
Instrumentação para medir estes
valores é fornecido na forma de sensor de referência vertical (VRS – Vertical
Reference Sensor), unidade de referência vertical (VRU – Vertical Reference
Unit) ou uma unidade de referência de deslocamento (MRU – Motion Reference
Unit). A MRU mede acelerações com o uso de acelerômetros lineares e calcula os
ângulos de inclinação.
Um desenvolvimento recente é a
provisão de um sistema que utiliza dois ou mais receptores DGPS com antenas
montadas a uma certa distância entre si. O GPS fixa e os sensores de movimento
fornecem dados de uma posição do navio, direcionamento da proa, roll, pitch e
valores de heave. Isto é capaz de fornecer uma posição de referência e direcionamento
da proa bem como movimento em e sobre cada eixo.
Todos sistemas DP tem sensores de
vento. Este dado é utilizado para calcular as forças de vento induzidas agindo
sobre o casco e estrutura do navio, fazendo com que estas forças sejam
compensadas antes que provoquem uma mudança de posição ou de direcionamento da
proa. Tipicamente, um sensor de vento consiste de um anemômetro transmissor. Muitos
sistemas de controle DP também têm um dispositivo de compensação de vento na
função de controle manual (joystick), fornecendo ao operador uma opção de
controle por joystick para compensação do meio ambiente.
Vamos explorar um pouco mais o
assunto:
A TÉCNICA DO POSICIONAMENTO DINÂMICO
A ação dos propulsores, estabilizando
a posição e o alinhamento da proa de um navio, não podem ser definidos sem o
conhecimento das forças que serão encontradas, devidos ao meio (oceano-metereológico). Este meio corresponde
principalmente ao vento, corrente e ondas. Pode também corresponder à ação das
amarras do sistema de ancoragem, à força de reação de uma rede que está sendo
lançada ao mar, ou à reação gerada pelo uso de canhões de incêndio (navios
offshore de combate à incêndio).
No caso de perfuração, a presença de
materiais tubulares caros que conectam o navio ao leito do mar, cujo rompimento
é capaz de promover uma poluição considerável, requer o conhecimento das
condições ambientais extremas para que o sistema de posicionamento dinâmico
pode contra-agir. Isto também se aplica a operações que requerem posicionamento
preciso na superfície (conexão à cabeça de um poço submarino, re-entrada etc
.).
AMBIENTE
Ações do meio ambiente são
normalmente difíceis de se determinar com precisão, especialmente com relação
às correntes e ondas. Isto é devido à natureza complexa e aleatória das ondas,
e das interações onda/corrente.

VENTOS
Num intervalo de
tempo suficientemente longo, o vento tem um componente médio e um componente
flutuante, que em si inclui rajadas. No Mar do Norte, por exemplo a velocidade
média do vento é frequentemente em torno de 60 km/h, com rajadas que excedem a
velocidade média em 30 a 40%.
Para navios que
estejam flutuando, a ação do vento provoca:
a) Desvio no plano horizontal
b) Offset no alinhamento da proa do
navio
c) Adernamento
A velocidade do
vento em si depende da altura acima do nível do mar. Equações matemáticas
complexas descrevem estes comportamentos desta componente que alimentam o
sistema de informação do DP no intuído de promover as devidas correções.
CORRENTES
Correntes provém de
várias fontes, incluindo correntes marítimas (correntes de marés), correntes
devidas às forças de Coriolis, correntes costeira, correntes de superfície
devidas à ação do vento, etc. Sua velocidade é normalmente cerca de 2 nós e
podem facilmente chegar aos 6 nós (correntes costeiras)
Similar ao vento, a
corrente induz uma força de adernamento no navio e uma mudança na direção de
proa do mesmo.
Em uma determinada
localidade, a velocidade da corrente varia de acordo com a profundidade, em
magnitude e direção. Seu valor normalmente decresce rapidamente com a
profundidade e sua direção pode ainda ser revertida.
As forças
correspondentes nos equipamentos suspensos abaixo dos navios, ou normalmente
localizados entre a superfície e o leito, devem também ser contrabalanceadas
pela ação dos impulsores do sistema de posicionamento dinâmico neste caso.
No mar, a corrente
de superfície é frequentemente devida ao vento. i.g. um vento de 110 km/h pode
induzir uma corrente de 1 m/s depois de 6 horas.
Mas uma vez modelos
matemáticos complexos alimentam o de informações o modelo do navio que está
armazenado nos computadores do sistema DP, promovendo as devidas compensações.
ONDAS
Onda é um fenômeno
físico complexo e aleatório. As ondas formadas pelo vento têm simultaneamente
componentes longos e curtos, os quais têm também direções diferente. Ondas
muito grandes podem alcançar até 30 metros de altura. As alturas das ondas e os
períodos aumentam com a velocidade do vento, sua duração, e a extensão da área
sobre a qual sopra.
A onda exerce
esforços consideráveis sobre as estruturas. No entanto, esta ação difere de
acordo com a freqüência.
OUTROS FATORES
Outros fatores além
do vento, corrente e ondas podem agir sobre o posicionamento e rumo do navio,
ou sobre o equipamento ao qual o navio está mecanicamente conectado. Isto
inclue:
a) Um tubo sendo descarregado
lateralmente do navio (força de tensão horizontal exercida no navio, de várias
toneladas)
b) A presença de outras estruturas na
vizinhança, levando a interações (caso de navios de suprimento)
c) Reação dos esguichos/canhão de
combate a incêndio, em navios de combate a incêndio.
d) A ação de pedras de gelo em mares
gelados
e) lançamento de dutos (rígidos e
flexíveis) e equipamentos
3.6 - Sistemas de Potência
Vital para o
funcionamento de qualquer navio DP são os sistemas de geração, suprimento e
distribuição de energia. Potência precisa ser fornecida aos propulsores
(thrusters) e a todos sistemas auxiliares, bem como aos elementos de controle
DP e aos sistemas de referência.
Os propulsores em
um navio DP são freqüentemente os maiores consumidores de energia a bordo. O
sistema de controle DP pode requerer grandes alterações de potência devido às rápidas
mudanças nas condições do tempo. O sistema de geração de força deve ser
flexível para que possa suprir energia rapidamente em face das demandas ao
mesmo tempo em que se evita o consumo desnecessário de combustível. Muitos
navios DP são fornecidos com uma planta geradora a diesel com todos os
propulsores e consumidores ligados eletricamente a partir de geradores movidos
a motores diesel. Um motor diesel e um alternador é conhecido como um conjunto
diesel-gerador.

O sistema de controle
DP é protegido contra falhas de energia elétrica do circuito principal por meio
da inclusão de um sistema de suprimento de força ininterrupto (UPS). Este
sistema fornece uma fonte de alimentação estabilizada que não é afetada por
interrupções de curto prazo ou flutuações da fonte de alimentação AC do navio.
Ela fornece energia para os computadores, consoles de controle, displays,
sistemas de alarmes e de referência. No caso de uma interrupção do suprimento
AC principal do navio, baterias irão suprir energia para todos estes sistemas
por pelo menos 30 minutos.
Existem
thrusters acionados diretamente por motores a combustão interna e
outros por motores elétricos. Vou me dedicar aos mais usados a
bordo, que são as plantas geradoras que alimentam os motores
elétricos dos thrusters.
A capacidade da
planta de geração e como ela será construída é de vital
importância para o bom desempenho do sistema de
posicionamento.
Até algum
tempo atrás, coisa de uns 10 a 15 anos, a potência dos thrusters
não era tão grande, algo em torno de 800 a 1000KW. A geração
era baseada em tensões mais baixas como 440v, 680v no máximo. Com o
passar dos anos, aumento da demanda de novos thrusters e a procura
de embarcações de posicionamento dinâmico, novos conceitos de
geração de energia foram aparecendo.
Os thrusters
passaram a ter potência de 3000KW , o que é uma grande potência
para um único thruster. Claro que isso acompanha um grande navio,
por exemplo um Navio Aliviador DP. Os engenheiros tiveram então que
apresentar novas idéias para que esses thrusters fossem viáveis,
principalmente porque o mercado estava exigindo mais
potência nas embarcações.
Então vamos
aos conceitos da eletricidade:
Primeira lei de
ohm: Tensão é igual a resistência multiplicada pela corrente , V=R.I ,
P=V.I. Com base neste conceito, quanto maior a tensão
menor a corrente. Então se eu tivesse que alimentar um
thruster de 3000KW com uma tensão de 440V, a corrente deste thruster
poderia chegar, quando fosse requerida, a 100% de sua capacidade (
a gente sabe que pessoal de náutica adora bater a
alavanca de passo do thruster no esbarro de fim de curso.),
em torno de 6.8KA (6800A). Estou fazendo
os cálculos básicos, não estou levando em conta
fator de potência, multiplicador trifásico etc. Agora calcule a
seção do condutor, ou seja , a bitola do cabo que deverá suportar esta
corrente, calcule também o disjuntor , calcule o tamanho do
MCA que deverá suporta esta carga, os componentes de partida do
thruster, pois ninguém vai partir um thruster desses com
estrela-triangulo. Enfim, uma serie de fatores. Fazendo
essas contas de forma bem simples chegamos a números
espantosos, que inviabilizariam o projeto. Então, qual seria
a solução? Simples , vamos aumentar a tensão. E foi o que foi feito.
A tensão de alimentação dos thrusters passou a ficar na
escala de média a alta tensão. A tensão mais comum para planta
de navios com thrusters potentes ou numerosos é de 6.6KV (6600V).
Com isso a corrente ficou dentro dos
parâmetros já trabalhados até mesmo em muitos navios
antigos.
Agora sim podemos
começar a falar da planta de geração. Como existem MCA de grande
potência disponíveis no mercado (exemplo Wartsila 18V32, que tem potência
máxima de 8500KW e o 18V50 pode chegar a 16500KW) agora é só calcular
os detalhes da planta geradora e montar a planta do DP.

Um navio DP
aliviador chamado Navion Stavanger, pra mim, deveria ser o modelo
básico pra qualquer Petroleiro. Nele há um conceito interessante que veio
do padrão europeu de fornecimento de energia, a
frequência no barramento é de 50Hz. Como sabemos que a frequência é
função da rotação do motor e que a rotação esta diretamente ligada
ao consumo de combustível, os engenheiros além de preparem um
quadro elétrico inteligente, somaram o conceito de redução
de NOx estabelecido pela IMO ao projeto do navio. Resumindo,
rotação mais baixa, menor consumo, menor emissão de
poluentes. Existem também os projetos baseados nos MCA de baixa tensão
que fornecem ao barramento 440V, os quais associados a um transformador
aumentador elevam a tensão para 6.6KV. Estes são, geralmente,
navios modificados , que não eram DP e depois foram
convertidos .
Os
navios DP geralmente tem MCA que geram 6.6KV e
transformadores rebaixadores que reduzem a tensão para 680V,
440V e 220V. Por conta da "alta tensão", pois na verdade 6.6KV é média
tensão, os barramentos ficam em salas separadas do CCM, e também
por conta do princípio da redundância que
o DP exige.
Deste modo
temos em uma planta de geração básica a seguinte sequência de
equipamentos: Gerador 6.6KV; Barramento; Transformador de Partida ou
Inversor de Frequência; Thruster. Esta é uma sequência bem
básica só para ilustrar a disposição dos equipamentos.
Como disse,
devido à potência dos thruster atuais, vários dispositivos foram
produzidos para aumentar a vida útil do equipamento e
proporcionar ainda mais aumento de potência a este. No conteúdo a seguir
sobre AZIPOD eu descrevo todos estes equipamentos e no post
dos inversores de frequência (a ser postado) tratarei das
melhorias que este equipamento trás.
As possibilidades
são enormes no mercado, temos os navios
lançamento de linha, navios de manuseio de âncoras, os PSV, navio
sonda, plataformas DP etc. O mercado exige cada vez mais equipamentos que
possam dar segurança as operações e torná-las possíveis.
3.7 - Sistemas de Propulsão
A capacidade DP do
navio é fornecida por seus propulsores. Em geral, três tipos principais de
propulsores são fornecidos com navios DP; propulsores principais, propulsores
de túnel e propulsores azimutal. Em navios DP onde tais formas de propulsão
principal são partes do sistema DP, os propulsores podem ser do tipo passo controlável (cp) girando a uma
constante rpm8 ou a velocidade variável. Motores
DC, ou sistemas de conversão de freqüência, permitem com que velocidade
variável9 seja utilizada com hélices de passo
fixo. Os propulsores principais são normalmente acompanhados por lemes
convencionais e engrenagens redutoras. Normalmente, a instalação de um DP
incluirá controle e feedback do(s) leme(s).

Esquema do Sistema de propulsão
Além dos hélices principais, um navio
DP deve ter propulsores bem distribuídos para controlar a posição. Tipicamente,
um navio DP tipo monocasco terá seis propulsores; três na proa e três na popa.
Os propulsores de vante tendem a ser propulsores de túnel. Dois ou três
propulsores de túnel são geralmente montados na proa.
Propulsores de túnel na popa são
comuns, operando em conjunto, mas controlados individualmente. Propulsores
azimutais projetam-se para o fundo do navio e podem ser girados para fornecerem
empuxo em qualquer direção. Propulsores azimutais têm a vantagem de poderem
fornecer empuxo em qualquer direção e são frequentemente utilizados para a
propulsão principal ao invés de propulsores de hélice convencional.
Um propulsor elétrico (podded
thruster - AZIPOD) é também um tipo de
propulsor azimutal, mas neste caso o motor e o eixo são encapsulados e giram
com o impelidor abaixo do casco. Anéis de deslizamento fornecem a energia do
navio para o conjunto girante que contém o motor ou motores.
Continua no próximo blog...
Muito esclarecedor!
ResponderExcluirGostaria que abordase alguma coisa sobre manutenções de DP.